Kanaf Rama
0815 Studio
UAV fleet operating system
0815 Studio
UAV fleet operating system
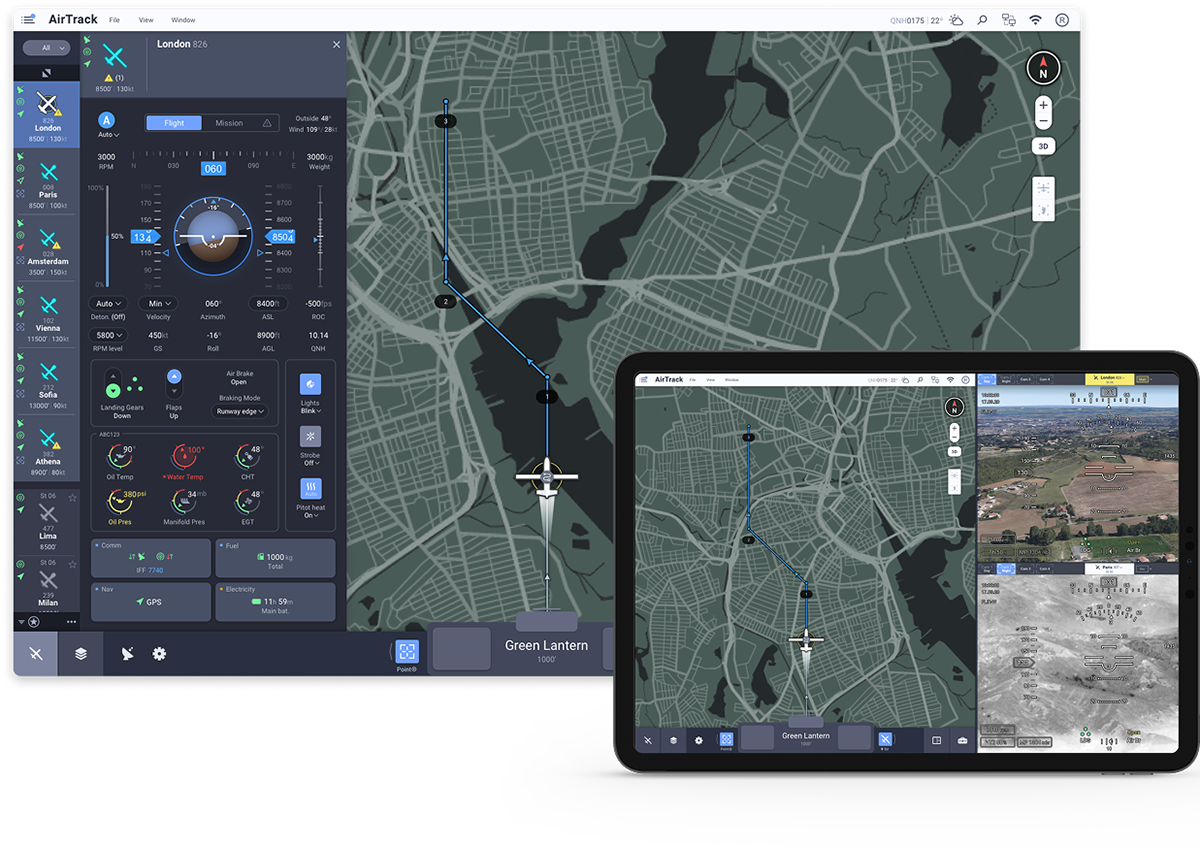
Kanaf Rama is a battle managing system that controls and monitors a fleet of unmanned aerial vehicle (UAV). The system provides an overview of the available vehicles and allows the operators to navigate and activate them remotely. The system is constructed of a map view alongside a live camera view from the UAV.
The client
Elbit systems Ltd.
The users
UAV operators, stationed in an operation room away from the vehicles.
The system
The system allows full view of the vehicles location in the air, as well as a live video view from the plane.
The system tracks all vehicles in the air and connects with them, operates the take-off and landing processes and provides real time technical information.
System structure
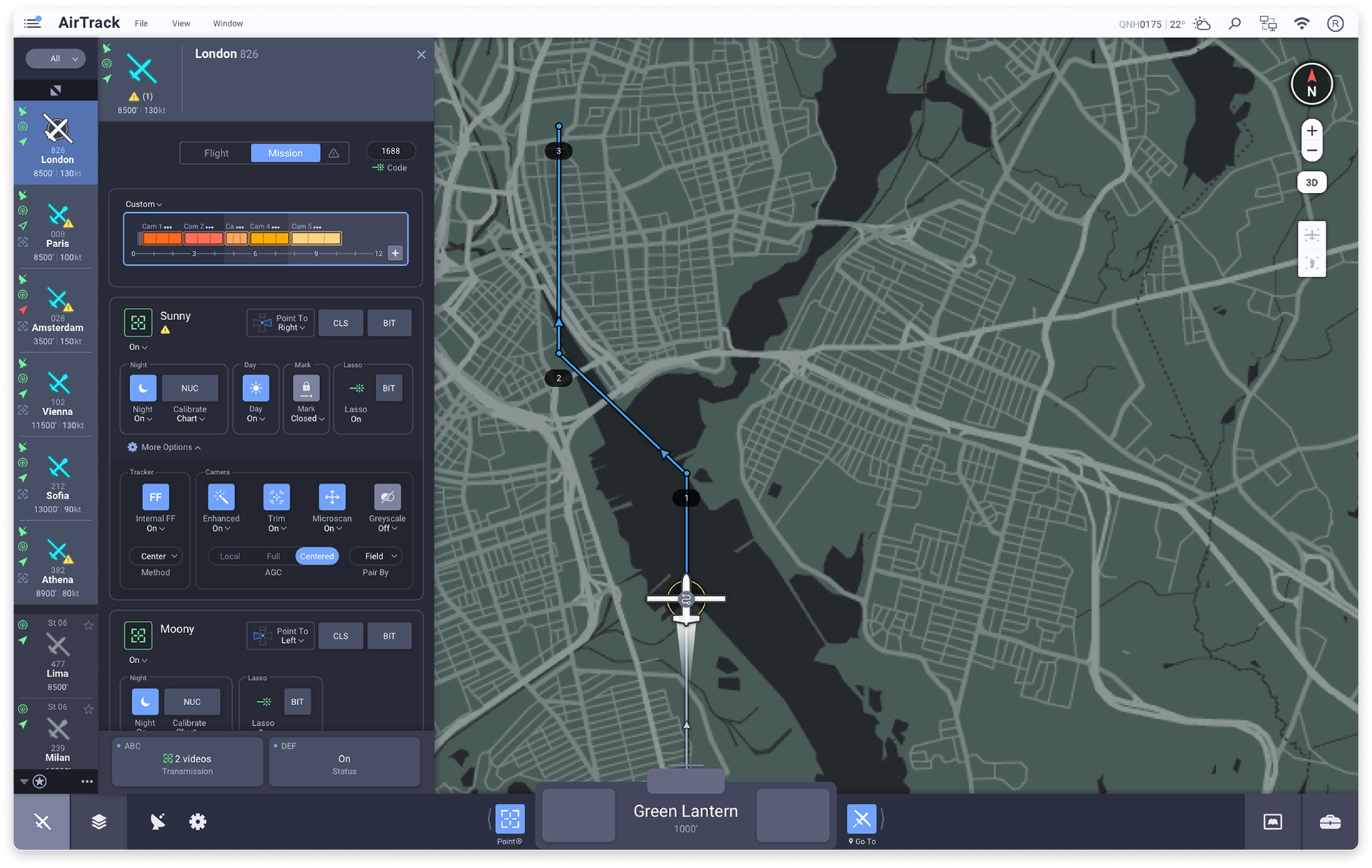
Main display - Showing the entire fllet, the UAV route and the vehicle status
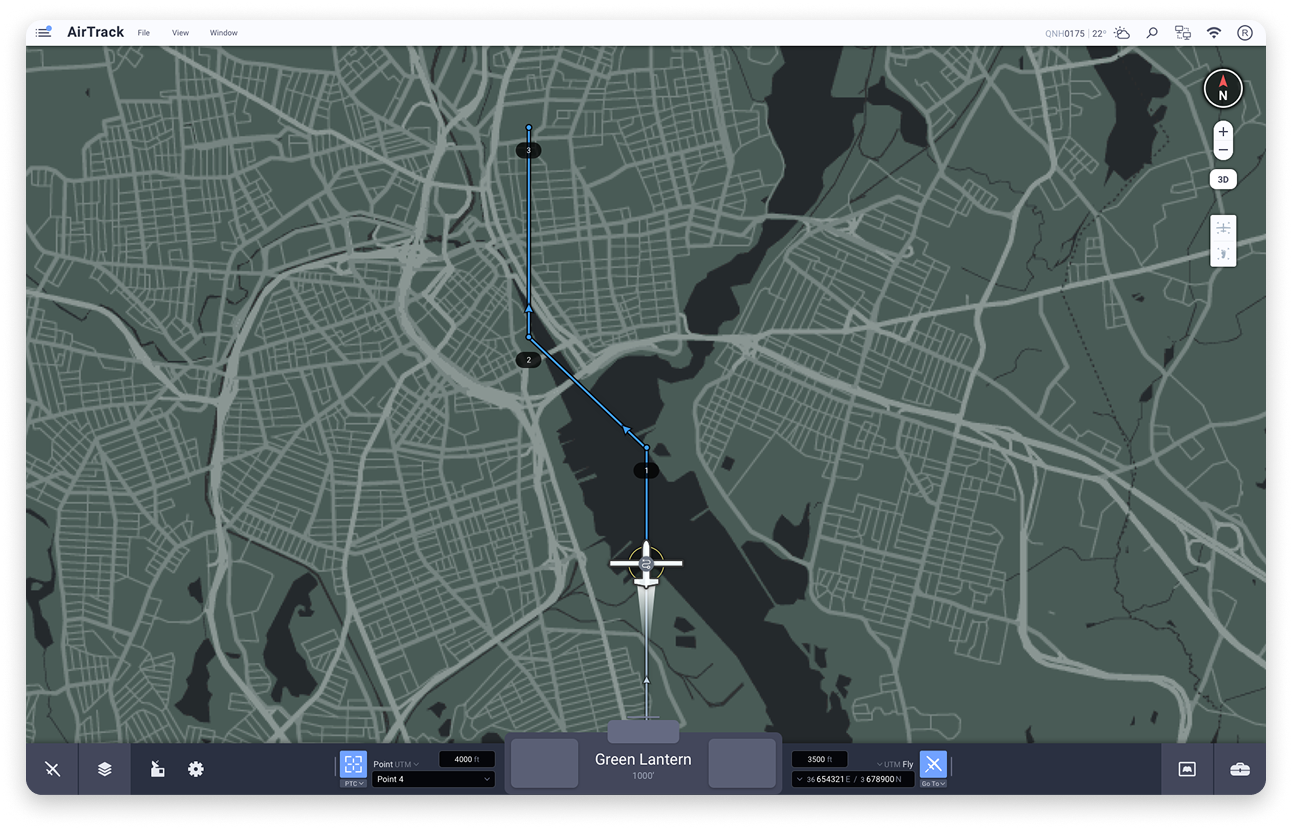
Direct to point view - by inserting a coordinate or selecting a pre saved location
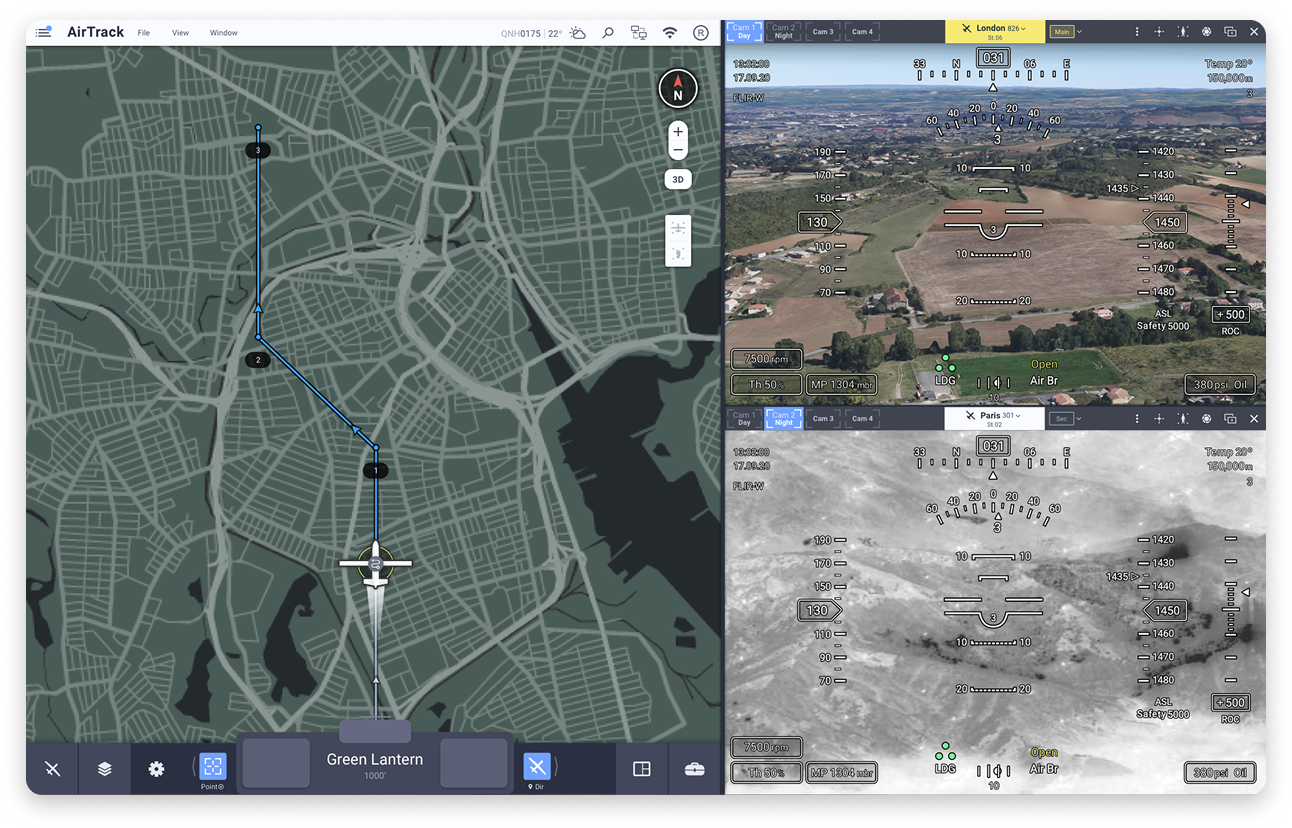
Live camera view - Video and thermal camera

UAV's engine settings and thresholds
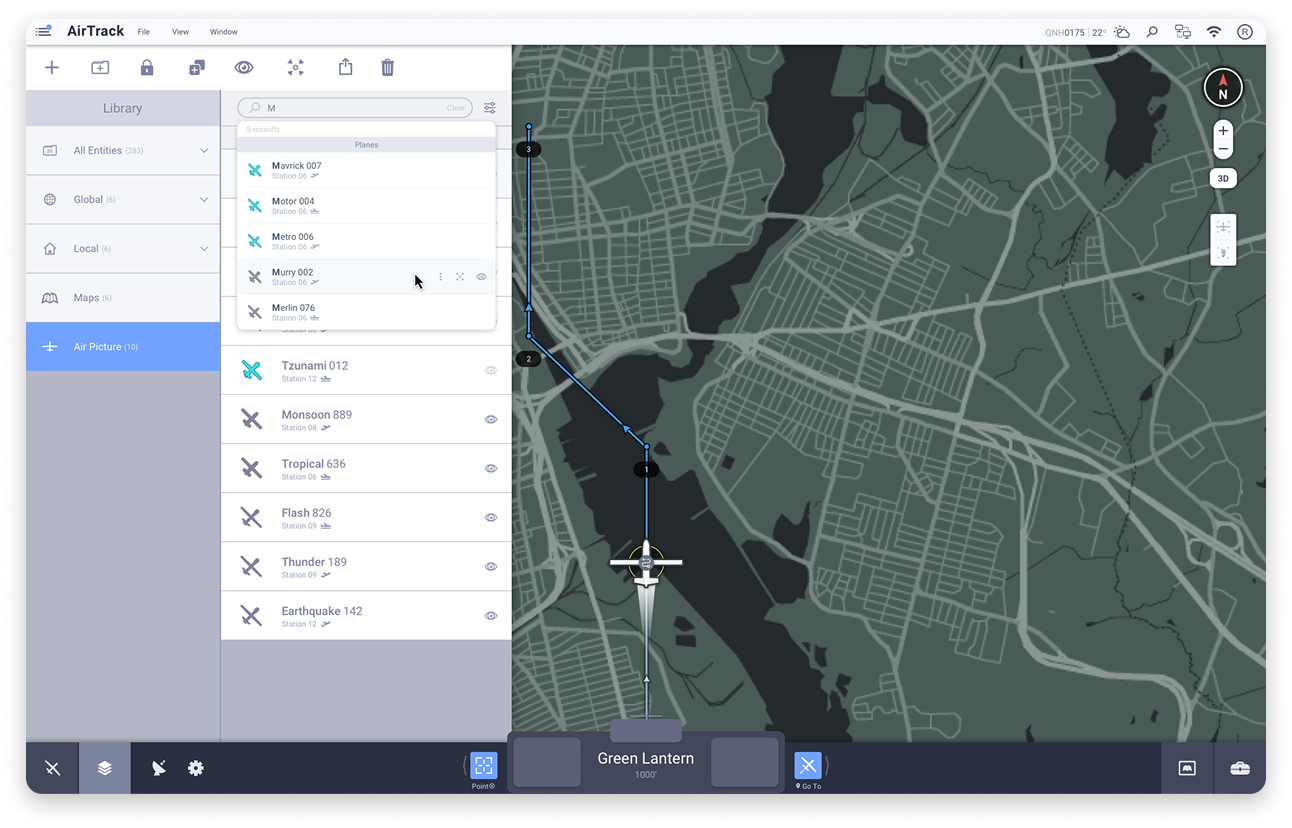
UAVs library

Multi monitors - layout selection
Remote
contol
calibration
contol
calibration
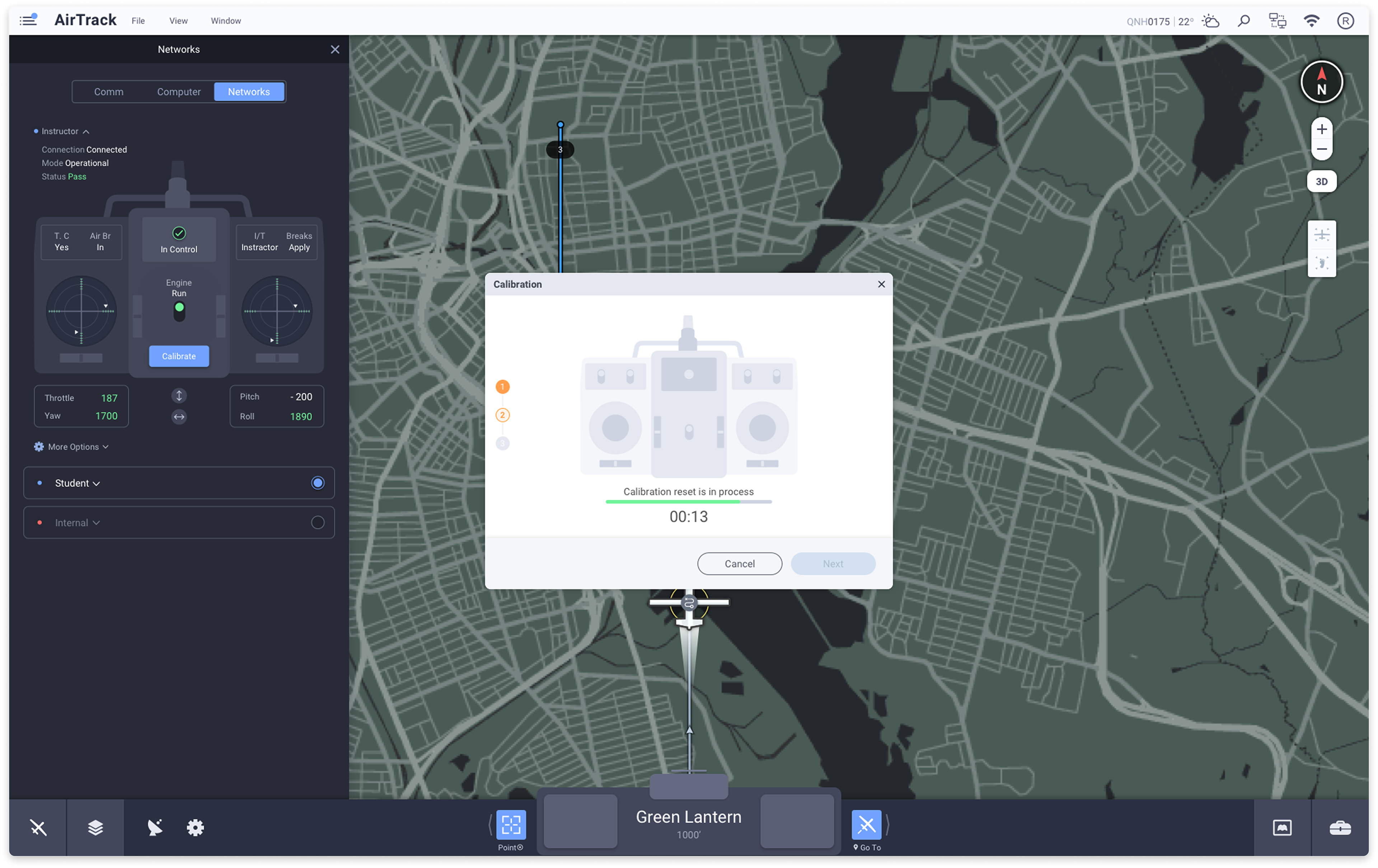
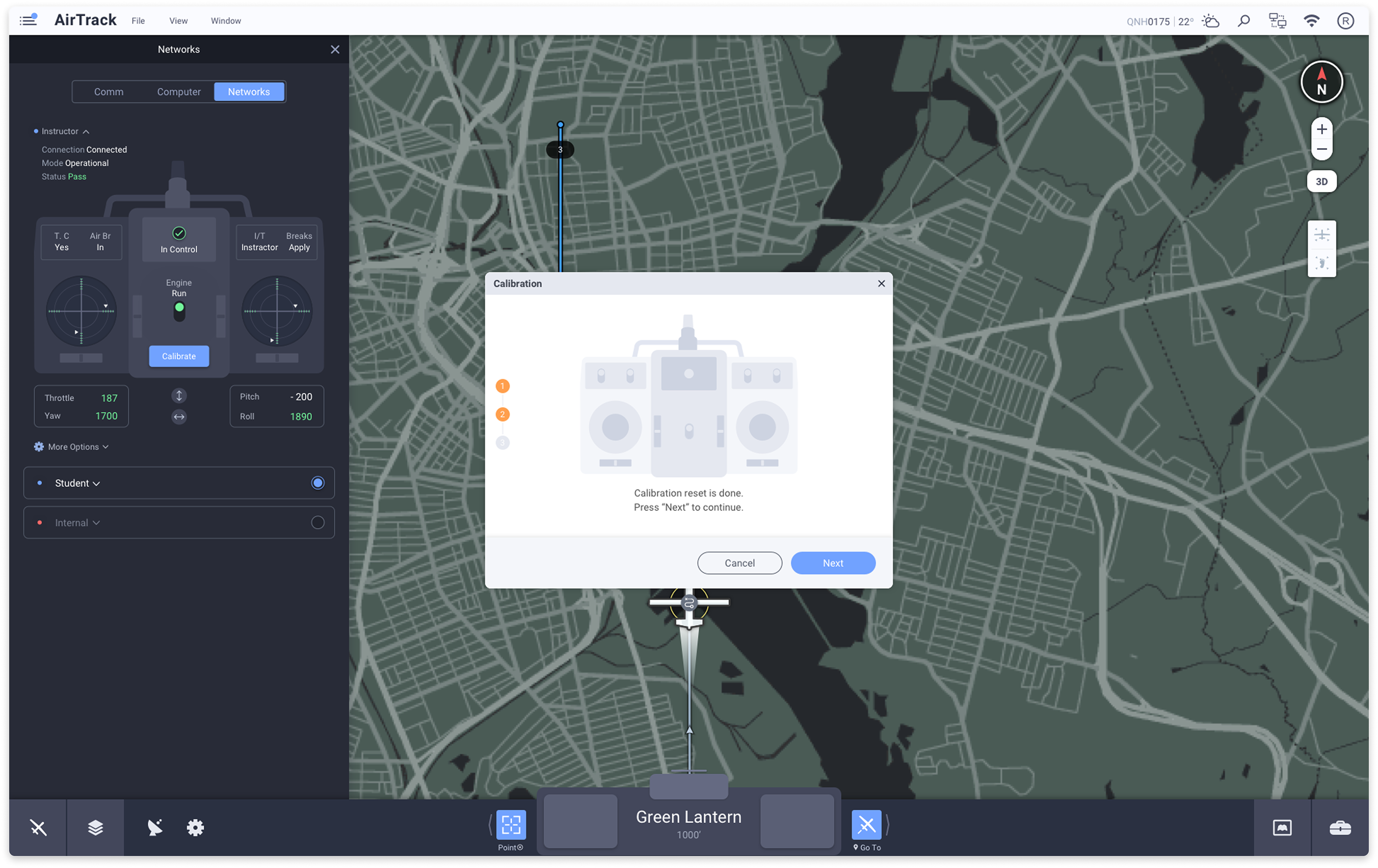
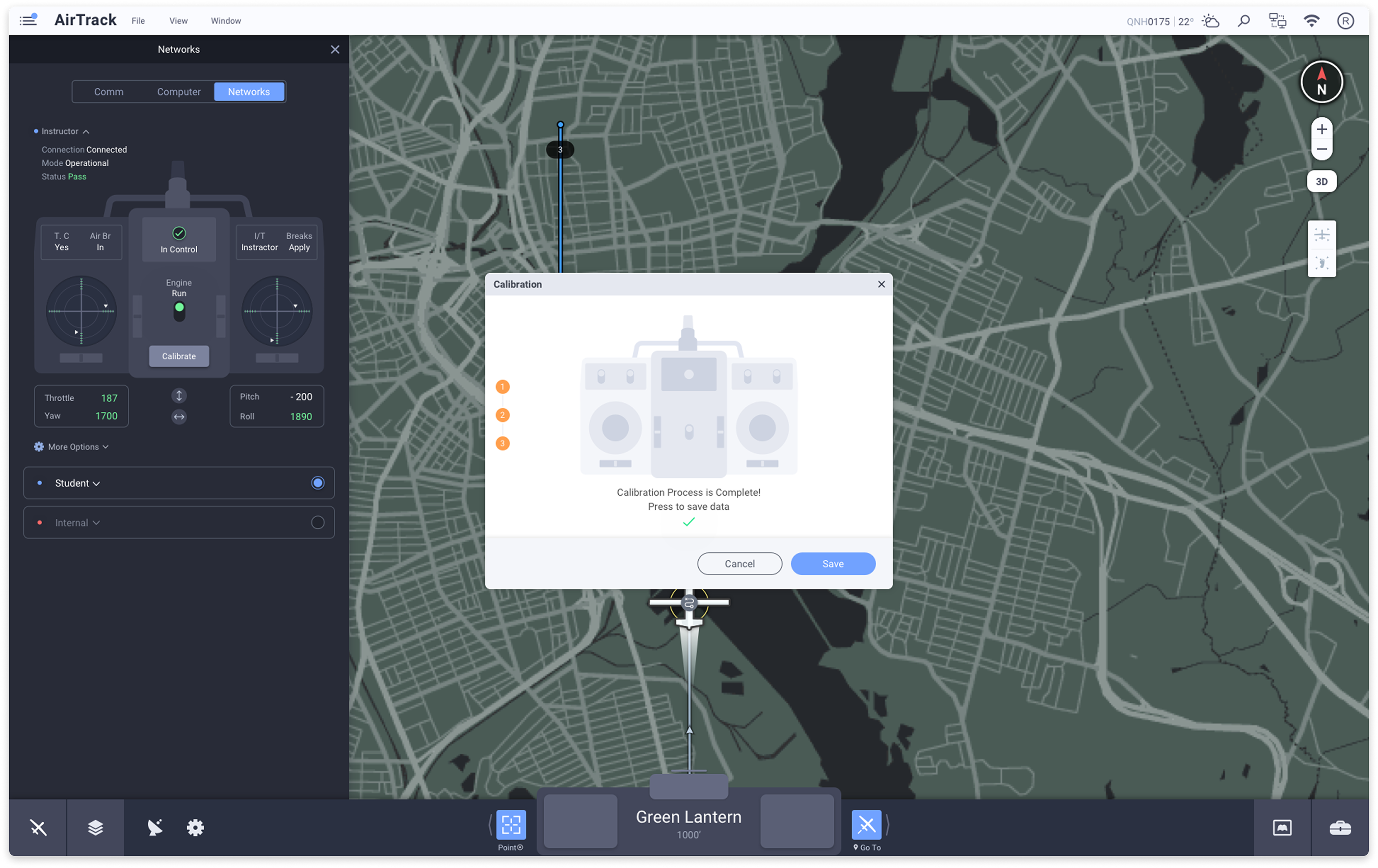
The UAV’s are controlled by the operators via a remote control.
In order to mate the UAV with the remote. a calibration process is due through the system. To keep the process clear and friendly, a wizard was made indication the necessary actions